环形工业4.0柔性制造实训博鱼(中国)
栏目分类:柔性制造与工业4.0 发布日期:2018-05-13 浏览次数:次
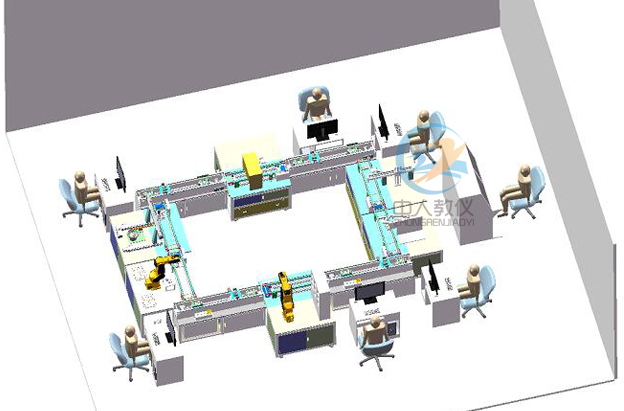
环形工业4.0柔性制造实训博鱼(中国),智能制造实训系统总控台、MES系统。此布局呈口字直线型安装,每站之间相互连接固定,整体结构简洁清爽易实训观察,更方便维修。咨询热线13122891392
联系方式见右侧悬浮框
【环形工业4.0柔性制造实训博鱼(中国),智能制造实训系统】是根据客户需求而写的,非常具有代表性,在客户搜索【环形工业4.0柔性制造实训博鱼(中国),智能制造实训系统】时,都能通过我们来了解相关资讯,而且【环形工业4.0柔性制造实训博鱼(中国),智能制造实训系统】在客户有需求时提供参考意见。
一、智能制造实训系统(六工站),智能智造生产线实训系统说明:
该方案包括上料单元(6关节)、法兰安装单元(直角)、视觉检测单元(RFID)、液压单元、分检单元(气动直角)、入库(6关节)、总控台、MES系统。此布局呈口字直线型安装,每站之间相互连接固定,整体结构简洁清爽易实训观察,更方便维修。备注:以上示意图不代表与实物完全相同。
1.3、气电系统需求
1.3.1、气源
空压机主要参数
1)功率≥750W;
2)压力≥0.7MPa;
3)排气量≥60L/Min;
4)容量≥18L;
5)外形尺寸:450×210×450mm,长、宽、高偏差在±5mm以内。
1.3.2、电源
1)输入电源:单相三线AC220V ±10% 50Hz,装置容量:<5kVA;
2)工作环境:环境温度范围为-5℃~+40℃ 相对湿度<85%(25℃)
1.3.3、液压系统
液压泵主要参数
1)功率≥550W;
2)电机:220V加电容;
3)工作压力≥6.3MPa;
4)油箱容量≥7L;
5)高压流量≥0.27L/Min;低压流量≥1L/Min。
二、智能制造实训系统(六工站),智能智造生产线实训系统总体方案介绍
2.1、标准工作台设计模块化柔性自动化生产线实训系统是一种最为典型的系统,适合相关专业学生进行工程实践、课程设计及初上岗位的工程技术人员进行培训。本次方案对柔性线进行模块化设计,由多个独立的工作站组成,其中各站的工作台进行标准化设计。标准工作台由标准工作台机体、标准上层输送线、标准下层输送线三部分组成。
说明:
1)标准工作站台面采用15MM铝板;
2)底部焊接机架采用50X50X3.2方管;
3)抽屉采用三节导轨,可全部打开,方便实训时对控制柜的学习;
4)三联件和开关电源安装采用内藏式; 安全不易被碰撞;
5)上部型材门采用磁性开关检测;正常工作开门会触发检测开关,博鱼(中国)会报警;
6)控制板采用网孔式,方便电气元件的安装,无需配打开孔。
7)标准工作站包括上层输送线和下层输送线。上下输送线可以对换安装;
8)采用福马轮做地脚,一体式调节方便;
9)人机界面和开关按钮设计在上部型材门上,方便操作。
2.1.1、标准上层输送线设计
该输送线用于上层载具的输送,同时可内置高精度阻挡定位机构、升降换向机构、阻挡缓存机构等,且能够内部自由调节安装位置。此输送线是通过异步电机驱动同步轮,然后带动同步带实现移载。
说明:
1)采用90W 异步减速调速电机驱动,同步带传动,速比10,速度≦30m/Min;
2)可输送负载5KG;
3)定位机构可以在线体内部移动位置实现任意调节;
4)可以移载宽204mm的载具;
5)采用耐磨带钢丝的聚氨酯同步带输送;
6)具有等待位功能,当上一工位来料太快时,可以增加一个阻挡机构实现暂时阻档;
7)可增加定位机构,用于实现载具定位;
8)采用型材30X30,30X60型材做主体结构;
2.1.2、高精度定位机构设计
高精度定位机构作为通用型定位组件,安装于上层输送线,每个单元的上层输送线都有安装此定位机构,通过定位机构的定位销对载具进行精准定位。被定位的载具会在上面完成本单元的工序。此机构通过气缸和直线轴承实现升降动作,通过气缸和阻挡块实现阻挡动作,通过定位销和载具上的衬套实现定位。阻挡块上加装接近开关,实现到位感应。
说明:
1)定位精度±0.05mm;
2)外形尺寸约为:150mmX210mmX90mm;
3)采用球型和棱形定位销;保证精度;
4)材料采用6061铝合金和不锈钢材质;
5)定位销螺丝固定时采用双叠型垫片或加螺丝胶,防止定位销松动;
6)定位机构可在上线体内部任意调节位置;
2.2、
控制系统采用MITSUBISHI公司的Fx3u系列PLC。
2.2.1、FX3U系列PLC介绍
1) 第三代微型可编程控制器 FX3U三菱PLC
2) 内置高达64K大容量的RAM存储器
3)内置业界最高水平的高速处理0.065μS/基本指令
4)控制规模:16~384(包括CC-LINK I/O)点
5)内置独立3轴100kHz定位功能(晶体管输出型)
6)基本单元左侧均可以连接功能强大简便易用的适配器
2.2.2、Fx3u系列PLC主要特点
1)最大384点的输入输出点数
可编程控制器上直接接线的输入输出(最大256点)和网络(CC-Link)上的远程I/O(最大256点)的合计点数可以扩展到384点。
2)可以连接的扩展单元/模块
输入输出的扩展博鱼(中国)可以连接FX2N 系列的输入输出扩展单元/模块。此外,FX0N/FX2N/FX3U系列特殊功能单元/模块最多可以连接8台。
3)程序内存
内置了64K步的RAM内存。此外, 可以通过使用存储器盒, 将程序内存变为快闪存储器。
4)运算指令
除了浮点数、字符串处理指令以外, 还具备了定坐标指令等丰富的指令。
5)内置RUN/STOP开关
可以通过内置开关进行RUN/STOP的操作。此外, 也可以从通用的输入端子或外围博鱼(中国)上发出RUN/STOP的指令。
6)支持RUN中写入
通过计算机用的编程软件, 可以在可编程控制器RUN时更改程序。
7)内置时钟功能
内置了时钟功能, 可以执行时间的控制。
8)支持程序的远程调试
如果使用编程软件(GX Developer), 可以通过连接在RS-232C功能扩展板, 以及RS-232C通信特殊适配器上的调制解调器, 执行远距离的程序传送以及可编程控制器的运行监控
2.3、人机界面
每个PLC,都配有一台台湾威纶通触摸屏,作为一机界面HMI。方便对本工作站状态的实时查看与控制。
三、单元介绍与节拍
3.1、上料单元3.1.1、单元机构设计
上料单元主要包括标准工作台、底座料盘、底座工件、法兰料盘、法兰工件、6关节、机械整形组件、真空吸盘工装组件等其他机构,主要实现底座工件整形,上料。
3.1.2、单元功能介绍
本单元是整个装配柔性线的起点,主要功能是机器人从料盘取料,取出工件底座,放入到被定位的载具治具上。上料单元的执行机构主要由六关节机器人、机械整形机构、高精度阻挡定位机构、气动夹具、同步带流水线等构成。检测装置包括:负压、接近开关、光电漫反射、磁性开关。
主要技术说明:
1)六关节机器人
以便于线体的升级和机器人的应用升级,选用了本公司生产的机器人。机器人的特点:采用自主研发的运动控制器,集成各种生产工艺包,特别是集成了视觉功能,使机器人在带视觉的应用特别方便。 根据本项目的需求,选用了6Kg级的智能视觉机器人。
主要参数如下:
机器人不仅支持在线示教与在线编程,还支持本地通过U盘Copy程序或通过MES系统下载程序。
2)机器人工装设计
通过气动夹具对工件进行上下料
3)EtherCAT总线
工业以太网EtherCAT以高性能、灵活、同步和开放等显著的特点得到广泛应用。保证其研发的EtherCAT具有良好的兼容性。工业机器人就是基于EtherCAT总线系统,能方便的扩展EtherCAT外围博鱼(中国)。
4)高精度整形
为精确组装,本工作台设计一个机械整型功能。通过机械整形,精度可达0.05mm。
3.1.3、实验目的
1、了解上料单元的工作过程;
2、了解料盘缺料检测;
3、了解传动机构和执行机构的工作原理,
4、了解光电传感器的原理和在此站的作用;
5、了解调速器对电机进行控制的原理;
6、了解同步带输送线(上层输送线)的结构设计和工作原理;
7、了解平皮带输送线(下层输送线)的结构设计和工作原理;
8、了解真空吸盘的原理;
9、了解载具如何被定位,高精度阻挡定位机构的设计结构和工作原理;
10、学习PLC编程;
11、了解继电器、电磁阀等电气元件的应用;
12、了解负压传感器的设置;
13、了解机械整形机构的工作原理;
14、学习6关节机器人基本编程;
15、学习6关节机器人的示教上料操作;
16、学习6关节机器人通过拖动示教上料操作;
17、PLC与机器人通讯原理;
3.1.4、人机界面
3.2、锁螺丝单元
3.2.1、单元机构定义
锁螺丝单元主要包括标准工作台、线轨直角机器人、开放式螺丝振动盘、真空吸嘴工装组件、电批组件等结构。主要实现在工件上自动锁螺丝。
3.2.2、单元功能介绍
本单元是线轨直角机器人吸取螺丝自动放到被定位的工件上,并拧紧。开方式螺丝振动盘的功能是对螺丝工件进行连续的排列出料。该单元的执行机构主要由三轴线轨直角机器人、开放式螺丝振动盘、高精度定位机构、带真空吸嘴的数控电批、上下层流水线等构成。检测装置包括:负压传感器、接近开关、光电漫反射传感器、磁性开关、、光纤传感器、原点开关,扭矩传感器。
锁螺丝是实际工业具最基本的应用,为了兼容工具的真实性与实训的方便性,用销替代螺丝,用真空吸盘替代数控电批。在频繁实训时,可以降低工件盒的损耗。
主要技术说明:
1)线轨直角机器人
丝杆线轨设计的直角机器人驱动采用步进电机,精度可达0.03mm; 丝杆直径16mm,导程10mm;X、Y轴采用双线轨双滑块,X、Y行程400mm;Z轴行程200mm。
3.2.3、实验目的
1)了解锁螺丝单元的工作过程;
2)了解传动机构和执行机构的工作原理;
3)了解光电传感器的原理和在此站的作用;
4)了解继电器、电磁阀的使用方法;
5)了解调速器对电机进行控制的原理;
6)学习用PLC控制编程;
7)了解同步带输送线(上层输送线)的结构设计和工作原理;
8)了解平皮带输送线(下层输送线)的结构设计和工作原理;
9)了解真空吸盘的原理及应用;
10)了解载具如何被定位,高精度阻挡定位机构的设计结构和工作原理;
11)学习线轨直角机器人基本编程;
12)学习线轨直角机器人的结构原理及运用;
13)了解步进电机的原理;
14)学习电批的运用;
15)了解光纤放大器的作用与原理;
16)了解振动盘出料原理;
3.2.4、人机界面
3.3、视觉检测单元
3.3.1、单元机构设计
视觉检测单元主要包括标准机台、视觉检测、红外扫描枪组件等机构。主要实现对组装好的工件进行检测和数据读取。
3.3.2、单元功能介绍
当载具到达本工位时,开启检测功能。包括检测法兰的尺寸是否合格,是否少螺丝(标准为4颗),以及法兰是否是金属材料。该单元的部件主要由金属传感器、工业相机、环形光源、红外扫描枪、高精度定位机构、上下层流水线等构成。检测装置包括:工业相机、接近开关、光电漫反射传感器、磁性开关。
主要技术说明:
1)法兰视觉检测
视觉系统由视觉主机,工业相机,镜头,光源组成。视觉主机通过千兆网口接入多个网络接口的工业相机。视觉主机通过Modbusu接入PLC博鱼(中国),当被检测物件到达时,PLC触发视觉系统采样图像,并进行图像处理、信号识别等先进技术。并对法兰尺寸参数进行测量,并依据判别结果返回到上位机。视觉系统的尺寸测量,配合合适的镜头,能达到 um 级的测量精度。
本案的配置如下:
视觉主机:10寸屏一体机
工业相机:大华A5501MG20,用500W像素,分辨率2590*2048;
相机镜头:16mm焦距镜头。工作距离:200mm;
2)法兰缺螺丝检测
利用视觉系统,在完成法兰尺寸检测后,进一步检测4个螺丝是否安装到位。在视觉成象中,有螺丝与缺螺丝的图象差别明显,可方便检测错是否漏打螺丝。
距离测量
检测原理:测量两条线段距离,检测工件是否合格;
测量是否漏安装
2)金属检测
本工位带的电容式传感器,用于检测法兰盖是否为金属。通过HMI,可以检测金属是良品,还是非金属是良品,或者二者都为良品。
3.3.3、实验目的
1)了解视觉检测单元的工作过程 ;
2)了解传动机构和执行机构的工作原理,光电传感器功能和在此站的作用以及继电器的使用方法;
3)了解调速器对电机进行控制的原理 ;
5)学习用PLC控制编程;
6)了解同步带输送线(上层输送线)的结构设计和工作原理;
7)了解平皮带输送线(下层输送线)的结构设计和工作原理;
8)了解工业视觉的工作原理及应用,学习视觉主机的操作;
9)了解载具如何被定位,高精度阻挡定位机构的设计结构和工作原理;
10)了解光电传感器的工作原理及运用;
11)学习扫描枪的功能,了解与上位机通讯功能,把扫描的ID,与检测的结果上传到上位机;
12)了解金属检测原理;
13)学习PLC的检测结果与MES系统通讯;
3.3.4、人机界面
3.4.液压单元
3.4.1、单元机构设计
液压单元主要包括标准机台、液压组件、贴标签机等机构,主要实现载具自动贴标签。
3.4.2、单元功能介绍
贴标签机安装在液压结构上。当传感器检测到工件到达到本工位时,控制系统触发液压机构盖章。
该单元主要执行机构由油缸、气缸等构成,检测装置包括磁性开关、光电传感器、油压检测。
3.4.3、实验目的
1)了解液压元件的工作原理及其应用;
2)了解液压技术的基本物理知识;
3)了解液压系统控制回路的设计;
4)学习系统的安装调试、故障诊断及排除;
5)了解油阀以及其他油路元器件的基本知识;
6)编写绘制该站原理图
7)用PLC控制该站全过程操作并编写程序
8)了解连杆传动机构
液压系统主要包括动力元件、执行元件、控制元件、辅助元件、液压油
3.4.4、人机界面
3.5分拣单元
3.5.1、单元机构设计
分检单元主要包括标准机台、气动直角机器人、废料盒、红外扫描枪、真空吸盘组件等机构。主要实现对安装好的工件进行分检,合格的通过,不合格的挑出。
3.5.2、单元功能介绍
分拣单元执行机构由XZ轴气缸,夹爪气缸等构成。检测装置包括:RFID、工业相机、接近开关、光电漫反射传感器、磁性开关。该站主要功能是:对待分检的工件进行扫描,读到产品的ID号。用产品的ID号,向MES请求该产品在检测单元的检测结果。合格产品进入下一站即升降梯立体仓库单元,不合格产品则抓取并丢入废料盒。
主要技术说明
1)气动直角机器人
该气动直角机器人把不合格品从流水线放置到废料盒。X轴气动有效行程700mm;Z轴气动有效行程400mm;气压≥0.6MPa。
2)机器人工装
夹爪最大宽度60mm
3.5.3、实训目的
1)了解分检单元动作:
2)了解气动机械手的气动原理;
3)了解无杆气缸的原理;
4)了解气动直角机器人机械结构设计;
5)了解异步电机的工作原理和实际应用;
6)了解磁性开关和光电开关的实际应用;
7)了解电机调速器的控制方式;
8)了解电磁阀、继电器的工作原理和应用;
9)了解红外扫描枪的应用;
10)学习扫描枪的功能,了解与上位机通讯功能,把扫描的ID,与检测的结果上传到上位机;
11)学习编写绘制该站气路图;
12)用PLC控制该站全过程操作并编写程序;
13)了解该站与废品单元、仓库单元的通讯和编程;
3.5.4、人机界面
3.6、电梯式立体仓库单元
3.6.1、单元机构设计
电梯式立体仓库单元由标准工作台、电梯式立体仓库构成,主要实现工件自动入库及在线显示仓库信息。
3.6.2、单元功能介绍
升降梯立体仓库单元执行机构由气缸、步进电机等构成。检测装置包括:RFID、接近开关、光电漫反射传感器、磁性开关,该站的主要功能是:根据检测单元的法兰是不为金属的检测结果,对工件进行分类,将金属法兰和尼龙法兰分别放入不同的仓库。该单元的部件主要由高精度定位机构、上下层流水线等构成。
主要技术说明
1)立体仓库设计
支持4×4的16格库位;总宽900~1000mm、负载12Kg。每个库位都有传感器,能检测是否有料,可在线知道库位状态,是否空闲。工作原理:X轴是线轨模组,Y轴是气动无杆缸,Z轴是链条式升降模组,工件夹取采用气动手指,旋转采用摆动气缸。通过XZ的联动,气动手指到达对应的库位,通过Y轴的移动和摆动气缸以及气动手指实现工件的进出仓。
2)立体仓库管理软件
在MES系统里,本工位的PLC与MES系统配合,实现立体仓库管理,具有以下功能:
1、仓库管理,定义存储区和仓位。用以下存储类型来表示实际的仓库结构:
收货区,发货区,不良区,退货区等不同的区;
2、从MES软件平台获取立体仓库执行命令,并下达给立体仓库PLC,执行原料入库、成品出库、移库、原料出料、成品回库等动作。实时采集立体仓库执行过程的各项数据,包括立库状态、已抓取信号、已放料信号、原料入库请求、成品回库请求以及各种报警信号等。
3、实时显示立体仓库仓位库存,实时显示当前执行任务及排队任务,出入库记录,报警记录等。
4、在HMI与看板上。显示立体仓库动态库存,作业状态信息显示,可实时显示立体仓库的库存与作业信息;主要显示信息:当前任务单信息,库位信息,物料名称、物料编码、出入库仓位等。
3.6.3、实验目的
1)了解气动机械手的气动原理及应用;
2)了解无杆气缸的原理及应用;
3)了解摆动气缸的功能及应用;
4)了解真空皮碗的工作原理和功能;
5)学习编写绘制该站气路图;
6)用PLC控制该站全过程操作并编写程序;
7)了解改站与废品单元、仓库单元的通讯和编程;
8)立体仓库操作原理;
10)学习链条式升降的工作原理;
11)学习立体仓库的结构设计;
12)了解步进电机的原理和编程应用;
13)了解光电传感器、磁性开关、原点开关的工作原理和实际应用;
14)学习查看库位信息;
15)了解电磁阀、继电器的工作原理及应用;
3.6.4、人机界面
3.7 转角换向单元
3.7.1、单元机构定义
转角换向单元主要包括2个内置换向组件的输送线(和上层输送线一样)和2个线体换向组件。
主要技术说明
1)转角换向机体采用50X50X3.2的方管焊接。
2)可内置换向组件的输送线(和上层输送线一样),技术参数和上层输送线一致。
3)线体换向组件采用25W异步电机,速比10,可调速,速度≦30M/min;采用耐磨带钢丝的传输带输送。
3.7.2、实验目的
1)了解本单元动作;
2)了解气缸的原理及应用;
3)了解传输线结构和传动原理
4)了解换向组件的结构及动作;
5)学习异步电机控制方式;
6)学习电磁阀、继电器的应用;
6)学习本单元PLC控制编程;
7)用PLC控制该站全过程操作并编写程序;
8)学习光电传感器、磁性开关、接近开关的应用;
四、数字化信息总控系统
数字化信息主控系统,负责整个系统的信息收集、汇总、通讯、监控等方面工作,由管理员负责操作管理,它带电源总控、MES软件系统、生产电子看板、视频监控系统,产线处的有数据均可从总控制台收集获取。数字化信息监控系统由以下组成:
| 序号 | 物料名称 | 主要技术参数 | 数量 |
| 1 | 主控台 | 2位组合,琴台式操作台 | 1套 |
| 2 | MES系统服务器 | Dell服务器 | 1套 |
| 3 | 无线路由器 | 300M无线路由器,2.4G/5G 双频段 | 1套 |
| 4 | 生产电子看板 | 42寸高清显示器,分辨率:1920x1080 | 1套 |
| 5 | 单元摄像头 | 红外线、低照度网络摄像机 | 7只 |
| 6 | 硬盘录像机 | 8路1TB硬盘录像机 | 1只 |
4.1、主控系统操作台
琴台式操作台,高密度木质桌面、后部电气安装柜、采用前后开门方式设计,2位组合式,第1柜为电源总控柜与视频监控系统、第2柜为MES系统服务器与MES系统显示器。
4.2、生产电子看板
生产电子看板,采用42寸大显示屏,通过立式支架。显示4部分内容:生产任务看板、工位状态看板、质量看板。如下
4.3、单元摄像头
在每个单元上增加摄像装置,可以远程实施监控到单元运行等实时状态,视频录像机实时对单元运行视频进行录制存贮,形成在线教材或视频教材内容;老师或管理人员可以远程监测到实时加工状态,并且可以实时指导学生教学。
主要技术说明
1.产品类型:网络摄像机
2.产品功能:红外线、低照度
3.有效像素:1305水平x1049垂直
4.镜头参数:3.6mm
5.最低照度:0.1Lux@(F1.2,AGC ON),0Lux with IR
6.水平清晰度:950TVL
7.电子快门:1/25秒至1/15,000秒
8.视频输出:1Vp-p Composite Output(75Ω/BNC)
9.产品电源:DC 12V±10%
10.电源功率:7W MAX
11.红外照射距离:50-80米
4.4、硬盘录像机
本网络硬盘录像机是集图像处理技术、网络技术、存储技术、智能化技术和结构技术等于一体的监控存储博鱼(中国),支持主流品牌网络摄像机的接入,可广泛用于家庭、超市、酒店、商铺等监控领域。
主要技术参数
1.视频输入:16路BNC
2.视频输出:VGA输出
4.视频帧率:PAL:25Fps,NTSC:30Fps
6.存储:SATA接口
7.硬盘个数:2个(最大支持2T)
11.网络管理:以太网10M/100M自适应
12.工作温度:-10℃~+55℃
13.工作湿度:10%~90%
14.电源: DC12V
监控画面通过一个,接在网络硬盘录像机接22寸显示器,可多画面显示监控画面。显示器嵌入在1号控制台里。
五、MES管理系统
5.1、MES系统概述MES系统(制造执行系统)是数字化柔性加工制造的核心组成部分,与生产线系统、物流系统、工控系统等实时数据交互。能充分体现工业4.0 CPS系统核心价值,展示智能制造网络化、信息化和智能化的核心软件。同时该软件与生产线、数字化看板系统、数据采集系统、一体化智能管控系统无缝对接,充分体现系统的完整性。系统采用B/S架构,可通过电脑、平板电脑、手机等终端随时随地远程登录系统;提供丰富的二次开发接口和个性化订制服务。
5.2、MES系统构架
5.2.2、MES系统模块图
MES带有很强的行业特性,每行业应用差别大。本方案是以生产组装,测试,仓储为主的生产流程。结合柔性生产线功能,MES系统如下:
5.2.3、MES业务流程
本方案部署的MES系统,可以实现从APP下单,到生产计划,资源调配,生产组装,产品检测,成品入库。完成整个产品的生产过程。
5.3、数据采集与监控
MES最大的价值就是数据和信息的转换。如果把MES比喻为人,那么生产数据就相当于人的血液系统。数据采集和通讯功能保证了信息集成化的实施。MES不单是面向生产现场的系统,而是作为上、下两个层次之间双方信息的传递系统,连结现场层和经营层,通过实时数据库传输基本信息系统的理论数据和工厂的实际数据,并提供企业计划系统与过程控制系统之间的通信功能,是应用于企业的重要信息系统。离开生产数据采集,生产管理部门不能及时、准确地得到工件生产数量;不能准确分析博鱼(中国)利用率等瓶颈问题;无法准确、科学地制定生产计划;无法实现生产管理协同。可见,只有有效地实现生产数据的采集,才能使得MES系统从根本上解决车间管理中计划跟踪迟滞、博鱼(中国)利用率低、产品质量难以提升等问题。
本系统MES的数据采集,实现了PLC数据采集与机器人数据采集。PLC通过RS485总线,Modbus协议与MES服务器通讯。PLC作为单元主控系统,所有外投,如I/O,扫描枪,视觉相机等,由PLC入数据处理后,再上传给MES系统。
5.4、工艺设计模块
数字化工艺设计模块,可方便导入第三方CAD等设计软件的设计文档和数据,自动对接物料清单,工序卡,工艺路径。生成的工艺路线直接控制生产执行系统,生产线自动安装工艺路径规划,进行传输与生产。
本模块具有产品基础信息、物料清单、工艺数据三大功能。产品基础信息包含产品规格信息,产品编码管理;物料清单包括物料清单维护、物料清单物料查询;工艺数据项包括工序管理和工艺路线。
5.5、生产计划模块
该模块需要包括基础参数、需求订单预测、主生产计划(MPS)和物料需求计划(MRP)等项目组成。主生产计划(MPS)项包括主生产计划运算和主生产计划维护;物料需求计划(MRP)包括MRP运算、MRP维护和MRP下达等功能。通过生产计划排单后,将生成生产工单,交给生产执行模块执行。
5.6、生产执行模块
生产执行系统旨在加强MRP计划的执行功能。把生产单通过执行系统,同车间作业现场控制系统联动。下达到车间的生产单,自动通过自动化立体仓库实时管控系统,下达批量出料命令,并自动给参与生产的工位下发派工单,相应工位信息终端自动更新该派工单信息,实时显示加工指南,生产进度与所需原材料信息。
生产过程中,紧密结合RFID系统,实时跟踪生产进度,并进行生产进度管理(WIP),通过每个工位的信息终端实时采集并上传作业时间和状态,实时监控生产进度和作业状态,及时发现故障和问题。质检工位可建立工序报检单或成品报检单,进入质量管理模块,进行质检工作。
5.7、生产看板
MES看板包括四个部分:生产任务看板、工位状态看板、质量看板。其中生产任务看板包括生产任务号、班组、线体等元素。通过该看板,我们可以及时了解生产任务的生产计划及产成数量,以及生产节拍计时等。该看板也为生产的前期准备提供了信息,比如当天需要生产什么。质量看板显示博鱼(中国)异常和生产异常信息的提示。博鱼(中国)看板可视化的显示博鱼(中国)运行状态。
5.8、报表管理
根据任务单号、工序信息、产品质量,博鱼(中国)运动行情况,分析并生成相应的数据报表统,作为生产线精益生产、工序优化、生产线平衡等提供数据报表,以便于进行生产优化及相关精益生产的实训项目。包含:
1、生产日报表:生产的每日统计报表;
2、生产月报表:生产数据的每月统计报表;
3、不良品报表:分类统计不良品类型和数据;
4、博鱼(中国)运行报表:自动生成博鱼(中国)相关运行数据报表;
5、博鱼(中国)运维报表:分类展现博鱼(中国)的运维信息;
5.9、立库实时管理
立库实时模块,具有以下功能:
1、管理仓库管理,定义存储区和仓位。用以下存储类型来表示实际的仓库结构:收货区,发货区,不良区,退货区,等不同的区;
2、从生产执行模块获取立体仓库执行命令,并下达给立体仓库PLC,执行原料入库、成品出库、移库、原料出料、成品回库等动作。实时采集立体仓库执行过程的各项数据,包括立库状态、已抓取信号、已放料信号、原料入库请求、成品回库请求以及各种报警信号等。
3、实时显示立体仓库仓位库存,实时显示当前执行任务及排队任务,出入库记录,报警记录等
4、仓库看板显示。显示立体仓库动态库存,作业状态信息显示,可实时显示立体仓库的库存与作业信息;主要显示信息:当前任务单信息,库位信息,物料名称、物料编码、出入库仓位等。
热门实训室:自动扶梯模型
如对本产品/文章:环形工业4.0柔性制造实训博鱼(中国),智能制造实训系统有任何疑问请随时博鱼网页版,我们将尽力为您提供最全的实训室建设方案和最优质的服务
本文关键词:环形工业4.0柔性制造实训博鱼(中国),智能制造实训系统
【环形工业4.0柔性制造实训博鱼(中国),智能制造实训系统】是上海中人原创,如果您在了解产品的过程中受到启发,想要咨询相关博鱼(中国)的问题,我们将派专员为您解决疑问,或者您在阅读【环形工业4.0柔性制造实训博鱼(中国),智能制造实训系统】中有想不通的问题,也可以咨询我们,我们将为您提供快速解决【环形工业4.0柔性制造实训博鱼(中国),智能制造实训系统】问题的方案
相关热词:
上一篇:机器人基础实训平台
下一篇:桌面式智能生产线实训系统
这些是最新的
热门关键词
热门排行
